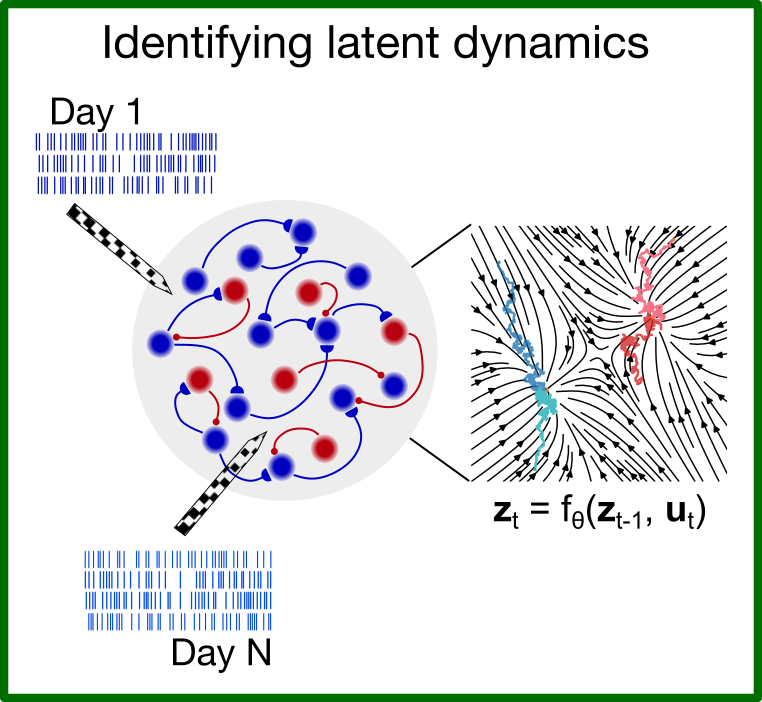
Data-driven discovery of shared latent dynamics
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.

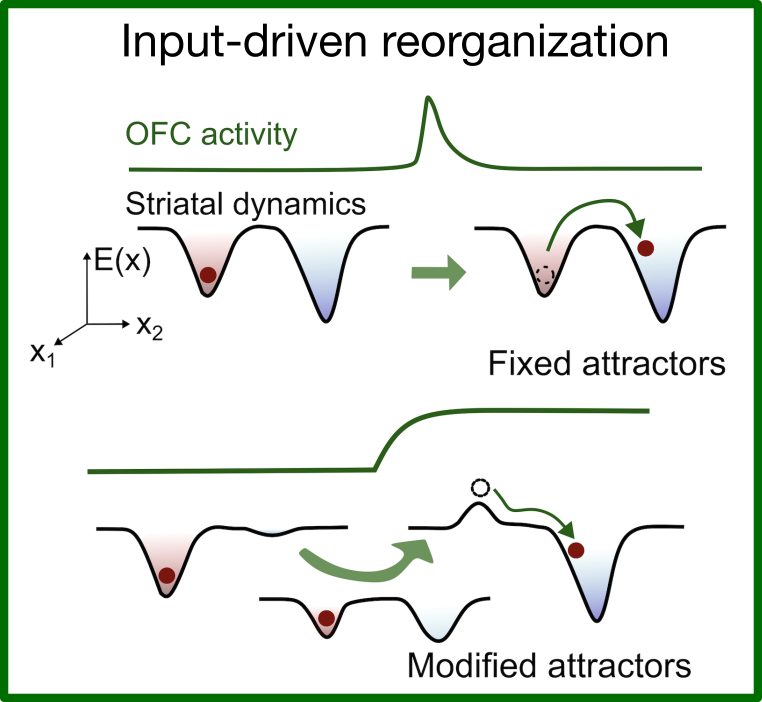
I am interested in the interaction of multiple learning pathways, both from an algorithmic perspective, as well as uncovering the multi-regional circuits that underlie learning. I study the neural dynamics that emerge over learning to support new task-relevant computations, with a focus on how feedback - sensory and internal feedback loops - can flexibly modulate effective cortical dynamics, and how these input-driven dynamics are learnt via multiple forms of errors.
Across projects, I integrate data-driven and/or normative modeling of behavioral strategies to analyze neural data in light of the actual computations at play and to better understand variability across individuals.
I am also motivated by a dynamical systems perspective that understanding neural computation requires not only identifying neural representations, but also uncovering the rules that govern how those representations evolve over time.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
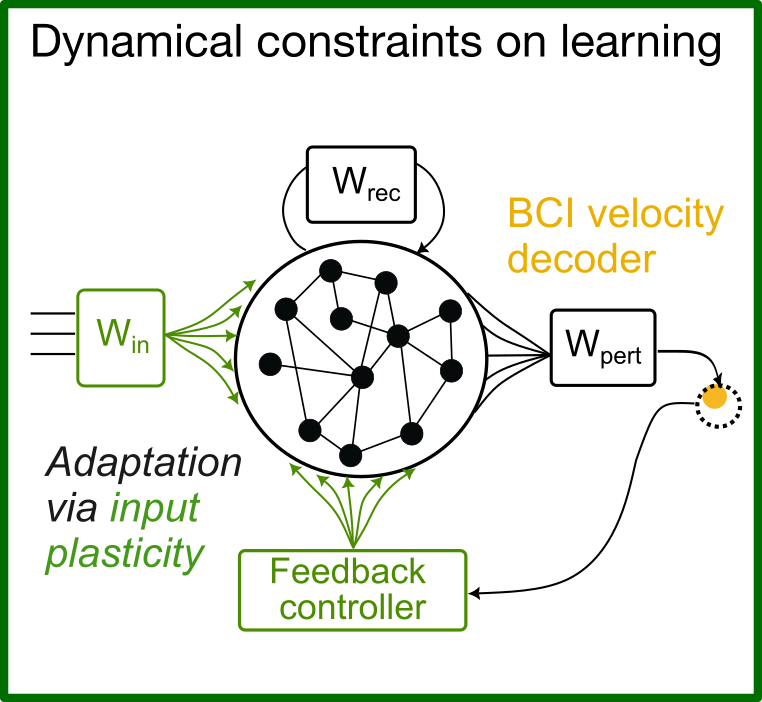
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
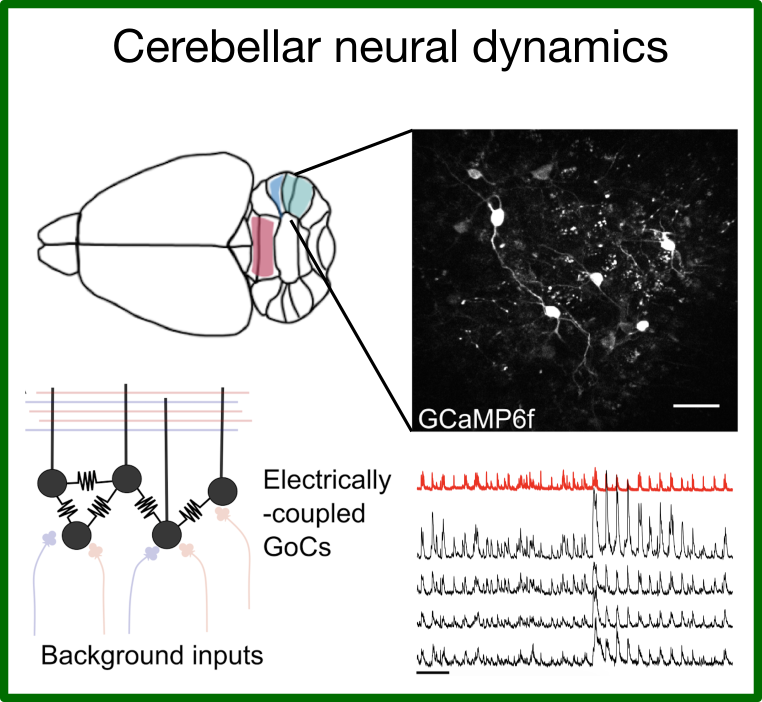
Network structure shapes inhibitory network dynamics and representational transformations across cerebellar circuits.
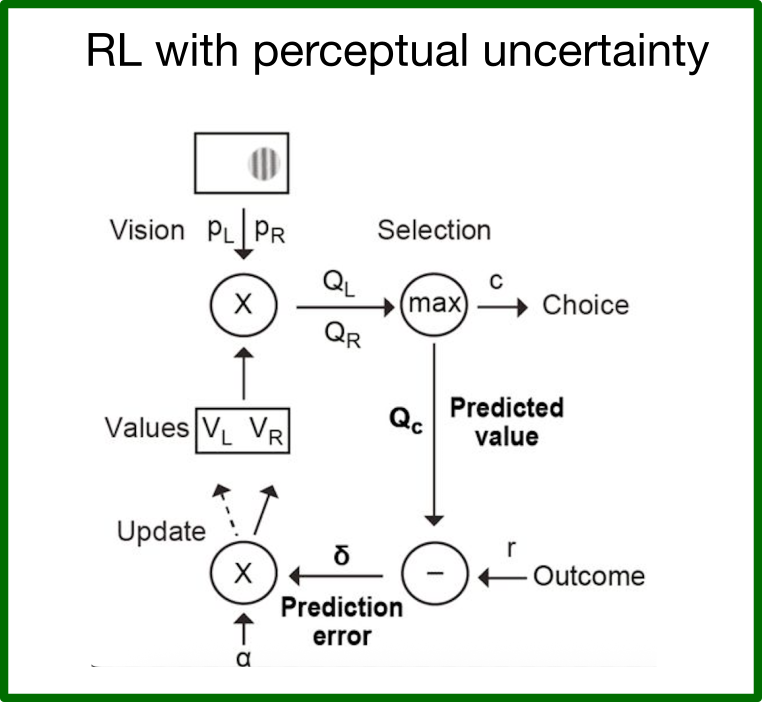
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.
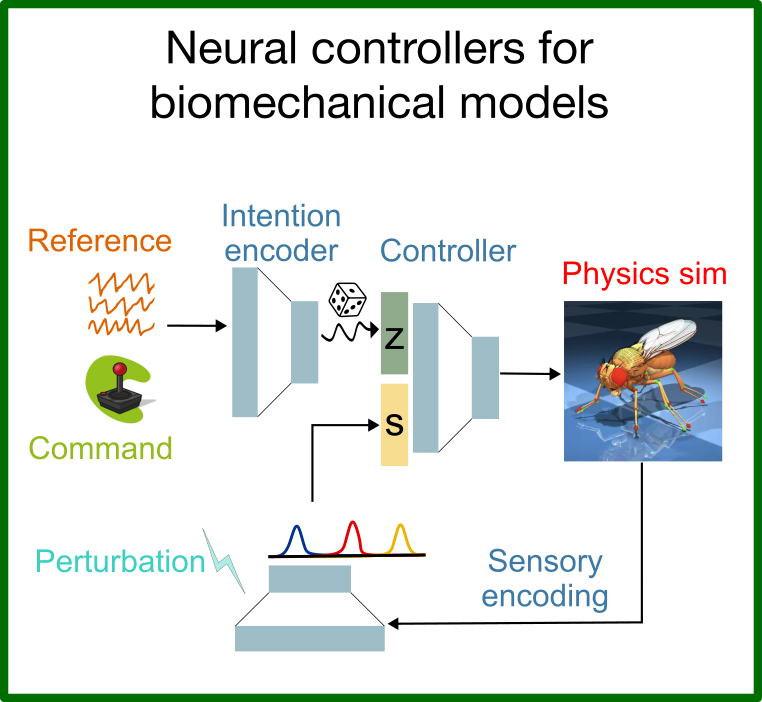
Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.
Fast adaptation via input-driven reorganization of dynamics, contextual inference, and flexible inter-area associations.