Data-driven models for control of biomechanical bodies
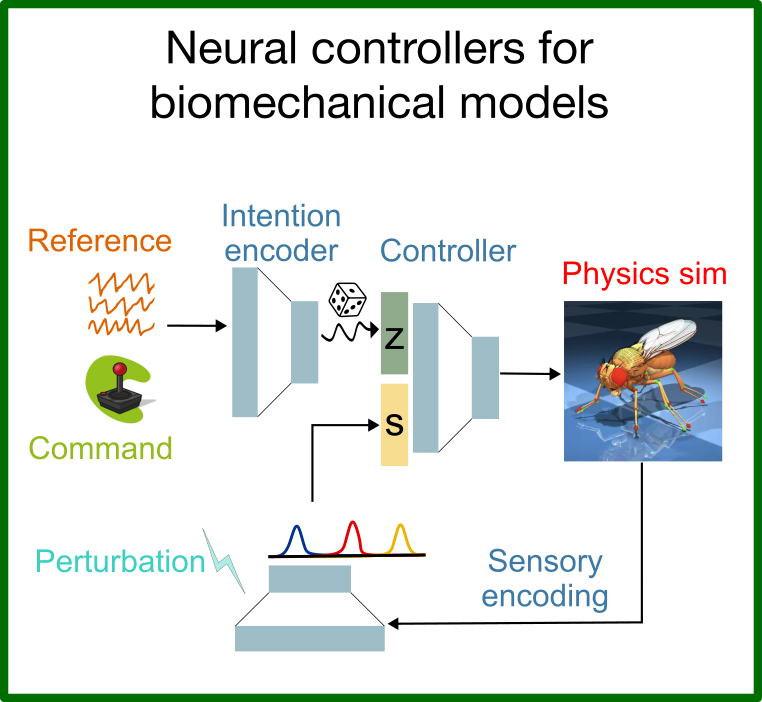
Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.

Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.
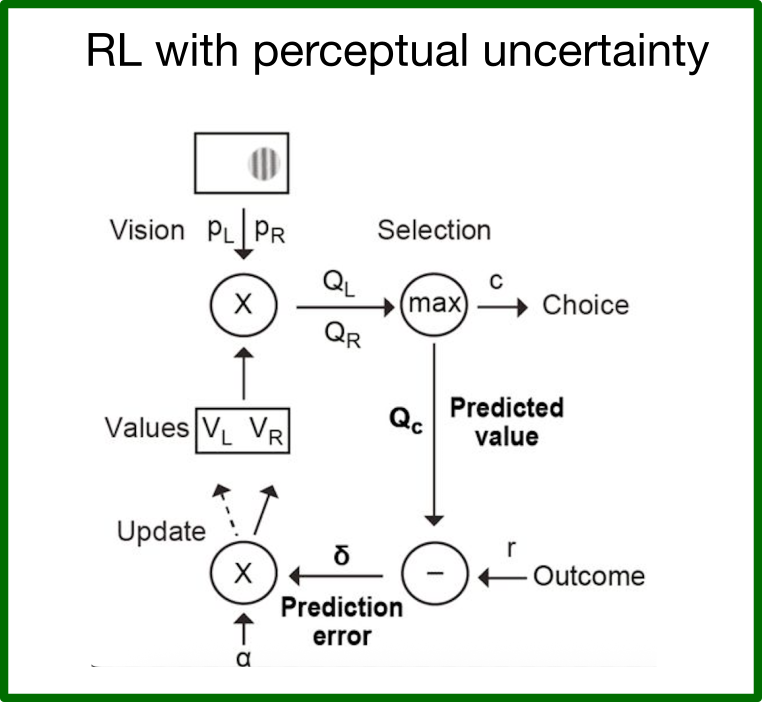
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.
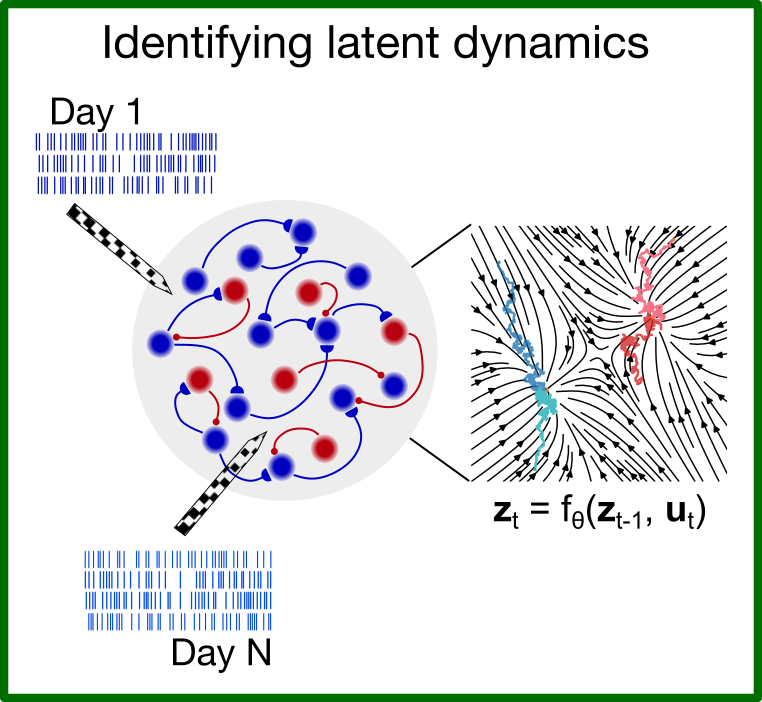
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.
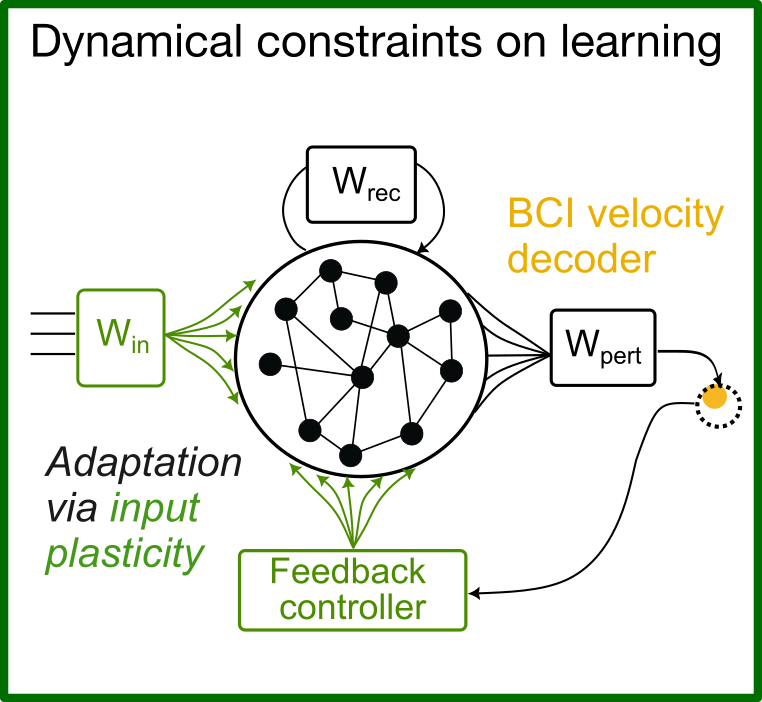
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
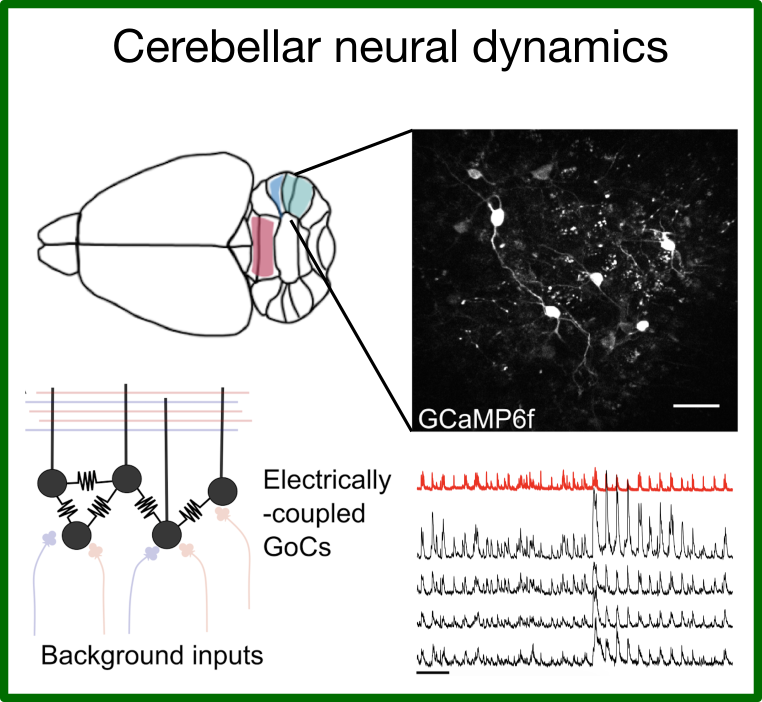
Network structure shapes inhibitory network dynamics and representational transformations across cerebellar circuits.
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
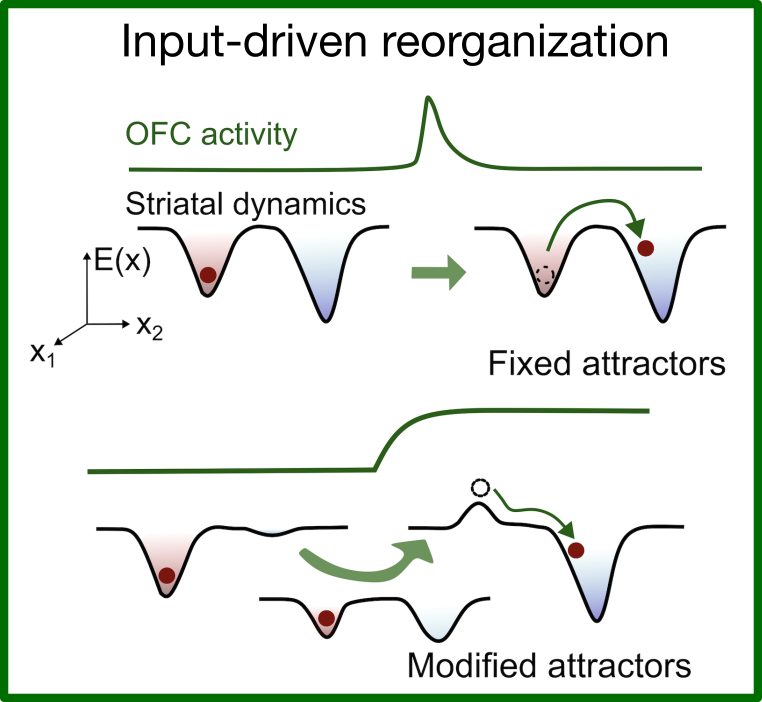
Fast adaptation via input-driven reorganization of dynamics, contextual inference, and flexible inter-area associations.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.
Network structure shapes inhibitory network dynamics and representational transformations across cerebellar circuits.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
Fast adaptation via input-driven reorganization of dynamics, contextual inference, and flexible inter-area associations.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
Fast adaptation via input-driven reorganization of dynamics, contextual inference, and flexible inter-area associations.
Identifying nonlinear dynamics from data, and aligning neural population activity across sessions.
Network structure shapes inhibitory network dynamics and representational transformations across cerebellar circuits.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.
Closed-loop neural controllers with biologically grounded sensory feedback for realistic locomotion in Drosophila.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
How feedback, intrinsic dynamics, and controllability constrain learning timescales for fast adaptation.
Fast adaptation via input-driven reorganization of dynamics, contextual inference, and flexible inter-area associations.
Network structure shapes inhibitory network dynamics and representational transformations across cerebellar circuits.
Computational signatures of reinforcement learning when state inference is uncertain due to noisy perception.